
 13867128415
13867128415
无人机高光谱与激光雷达服务数据采集
采集参考Q/EX C 0628-2025标准
无人机高光谱与激光雷达监测服务
无人机设备,包括M350RTK、M300RTK(配备A/B双控系统及增强图传),搭载了高光谱成像仪(138个波段)、激光雷达系统,以及用于正射影像采集的相机,确保多维度、高精度数据同步获取
一、前期准备
(一)需求沟通与方案制定
1. 本次数据采集的主要任务包括:获取四个小流域及两个样地的高光谱与激光雷达数据,要求高光谱数据拼接后成像亮度均匀、阴影部分最小化,激光雷达数据冠层点云密度尽可能高,航带完整。所有航飞区域均在原定样地边界基础上向外扩展50米,以确保数据覆盖全面。
(二)无人机高光谱与激光雷达监测服务设备选型
1. 为保障飞行任务顺利实施,相关人员在任务前期做了大量准备工作:样地边界精准定位:在原有样地坐标基础上向外扩展30–50米,确保飞行区域完全覆盖实际样地;航线科学规划:利用Land Viewer等专业地理信息系统,结合地形与样地布局,设定与样方方向一致的航飞角度磁北356°,优化飞行路径,所有样地航飞参数保持一致;天气严格筛选:激光雷达数据采集优先选择雨后至少一天、冠层干燥的天气;高光谱则选择云量低于10%、太阳高度角大于40°(高落差区域大于50°)的晴朗天气,同时自然风速在8米/秒以内;飞行报备与空域协调:所有飞行任务均通过国家无人机监管平台UOM及国家公园当地执法所完成报备,确保飞行活动合法合规;应对限高挑战:针对长虹、何田、齐溪等位于500米限高区的流域,采用“高低起降点接替飞行”策略,由双人团队协作,确保全天候连续高效作业。复杂天气及大范围执飞挑战:高光谱飞行受天气影响较大,需同时关注太阳高度角、移动云层的动态以及不同坡面可照射时长,采用分区采集和不同坡向的分时采集,最终采用多时相互补拼接方式完美解决。03飞行执行高效,数据质量优异正式飞行任务分为试飞与数据采集两个阶段:试飞阶段:通过挂载H20相机进行仿地100米高度飞行,验证设备状态与信号传输,为后续正式任务奠定基础;•高光谱采集:设置仿地飞行高度150米,最大飞行速度6米/秒,根据实际起降地形设置返航高度50-280米,严格执行黑白校正流程,每次校正时长间隔不超过30分钟。受多云天气影响,整个采集过程历时25天,其中长虹小流域因天气复杂采取分区采集方式,耗时6天,其余流域有效执飞基本在2个晴天内完成。目前共获得18.8TB原始导出和中间数据,最终获取的高光谱缩略图拼接效果良好,除部分北向坡面因太阳高度角与地形原因存在阴影外,整体数据质量高,无明显暗区,完整光谱数据待进一步拼接转换;•激光雷达采集:设置仿地飞行高度80米(长虹、何田因地形复杂提升至100米),最大飞行速度8米/秒。激光雷达数据采集不受多云天气限制,与高光谱任务交替进行,总耗时约一周,共获取点云原始数据与赋色影像近932GB,初步点云解算图已生成,冠层结构清晰;•数据导出与存档:每次飞行任务结束后,及时导出高光谱与激光雷达原始数据,分类存储并上传至科研服务器,高光谱数据根据飞行样区与大小在1-2天内获取初步缩略图,激光雷达在1天内完成航线点云的初步处理,根据缩略图拼接效果和航线及点云完整度决定后续是否补飞;目前所有数据已进入完整拼接、解算与后期处理阶段。

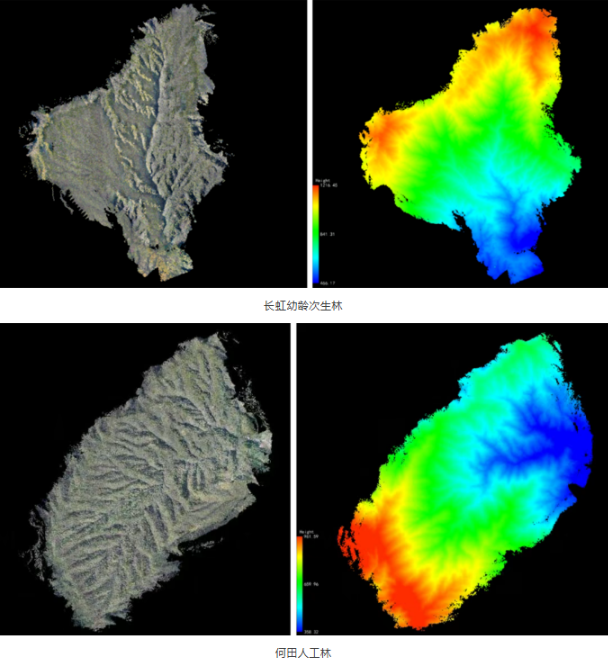
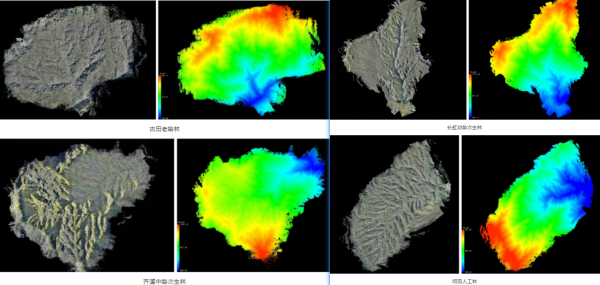
2. 正射影像:虽未完成全面拼接,但试飞与航线规划阶段获取的局部影像已为后续分析提供基础;•高光谱缩略图:涵盖古田、长虹、何田、齐溪四个小流域,拼接图像清晰展示了植被冠层的光谱特征,为植被分类、健康诊断、光合作用能力评估等提供直观依据;• 激光雷达点云数据:初步解算生成的点云图分辨率高、冠层结构细节丰富,为生物量估算、林分结构分析、三维植被建模等研究打下坚实基础。这些高光谱与激光雷达数据将在以下方面发挥重要作用:• 支撑钱江源国家公园典型区域生态系统动态监测与长期科研观测; 为生物多样性保护、碳汇计量与生态产品价值实现提供数据支撑;• 推动遥感技术在自然保护地管理中的深入应用,提升生态保护的科学化与智能化水平。


二、数据采集
 首页
首页
 数据采集
数据采集
 数据处理
数据处理
 联系我们
联系我们